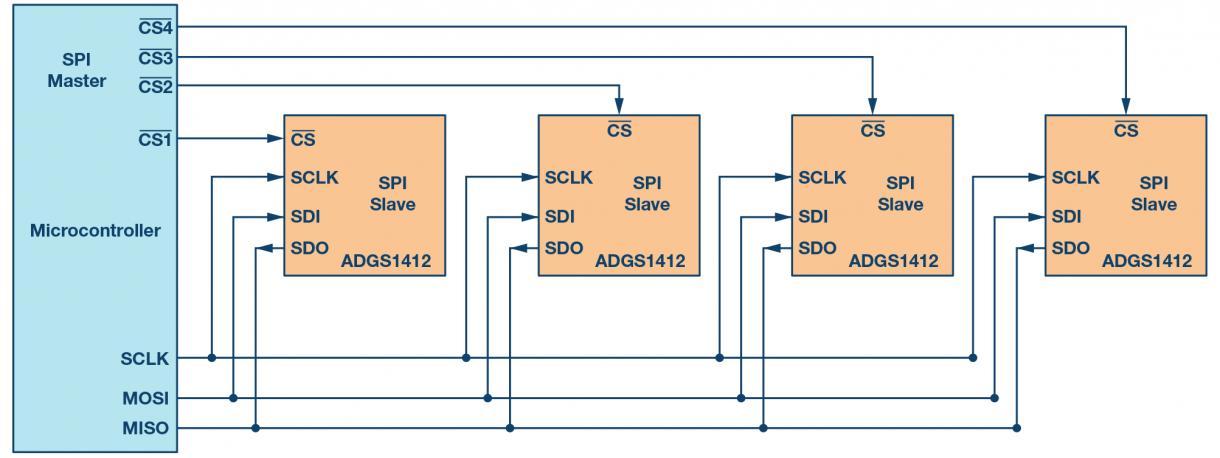
SPK(Serial Peripheral Interface)总线是一种用于在微控制器和外部设备之间传输数据的串行通信协议。它通常用于连接低速外围设备,如传感器、存储器、显示器等。SPK总线使用了主从结构,其中一个设备充当主设备,负责发起通信和控制传输,而其他设备则充当从设备,被动地响应主设备的指令。
1.
2.
3.
4.
确保主设备和从设备的电气特性和物理连接符合SPK总线的要求,包括电压电平、线路阻抗、连接方式等。
检查设备之间的时钟信号共享和数据线连接是否正确。
在主设备上配置SPK总线的通信参数,如时钟频率、数据格式(例如数据位宽、传输模式)、时序设置等。
初始化从设备,使其进入可接收指令的状态。
主设备通过发送特定的控制字节或命令来启动数据传输,从设备根据接收到的指令执行相应的操作。
主设备和从设备之间交替进行数据传输,直到传输完成或中断发生。
实现错误检测和纠正机制,例如校验和、奇偶校验、CRC等,以确保数据的可靠性和完整性。
处理通信中可能出现的错误情况,如超时、丢失数据、冲突等。
在数据传输完成后,主设备发送结束信号或命令,通知从设备结束通信并进入待命状态。
清理和关闭SPK总线相关的资源,释放硬件和软件资源。
```c
include
include
include "spk_driver.h" // 假设有SPK总线驱动程序
int main() {
// 初始化SPK总线
spk_init();
// 设置通信参数
spk_set_clock(1000000); // 设置时钟频率为1MHz
spk_set_data_format(8, SPI_MODE_0); // 数据位宽为8位,模式为0
// 初始化从设备
spk_device_init(SLAVE_DEVICE_ID);
// 发送数据
uint8_t tx_data = 0xAA;
spk_transfer(&tx_data, NULL, 1); // 发送1字节数据
// 接收数据
uint8_t rx_data;
spk_transfer(NULL, &rx_data, 1); // 接收1字节数据
// 处理接收到的数据
printf("Received: 0x%X\n", rx_data);
// 结束通信
spk_close();
return 0;
}
```
以上代码演示了一个简单的SPK总线通信过程,包括初始化设置、数据传输和结束通信等步骤。在实际应用中,需要根据具体硬件平台和外围设备的要求进行相应的配置和处理。
通过以上指南,你应该能够开始编写和理解SPK总线的基本应用程序了。记住,在实际开发中,不断调试和优化是必不可少的,以确保通信的稳定性和可靠性。
文章已关闭评论!
2024-11-26 15:22:24
2024-11-26 15:21:17
2024-11-26 15:19:50
2024-11-26 15:18:37
2024-11-26 15:17:14
2024-11-26 15:16:08
2024-11-26 15:14:51
2024-11-26 15:13:44




